iPhoneとopen3Dで快適な3D撮影! Sketchfabに公開
はじめに
- iPhoneで3D Scanしても全周囲を綺麗に撮影するのは難しい.
- なので,前面と後面を別々に撮影してから,open3Dで位置合わせした.
- Sketchfabにuploadして3Dでグリグリ見えるようにした.
リンク
Capture: 3D Scan Anything
- iPhoneで3D Scan出来るAppを使う.
- STLファイルで取り出せる.
apps.apple.com

open3D
- オープンソースの3D SDK.
- これで前面と後面を別々に撮影したPoint cloudを位置合わせする.
- ついでにノイズ除去も行う.
- open3d version0.9.0でpointcloudのmesh化が実装されたので、それもやってみた.
- http://www.open3d.org/index.php/2019/12/19/open3d-0-9-0-is-ready/
Point cloudを位置合わせするpythonコード
- githubにコードを置いた. github.com
結果
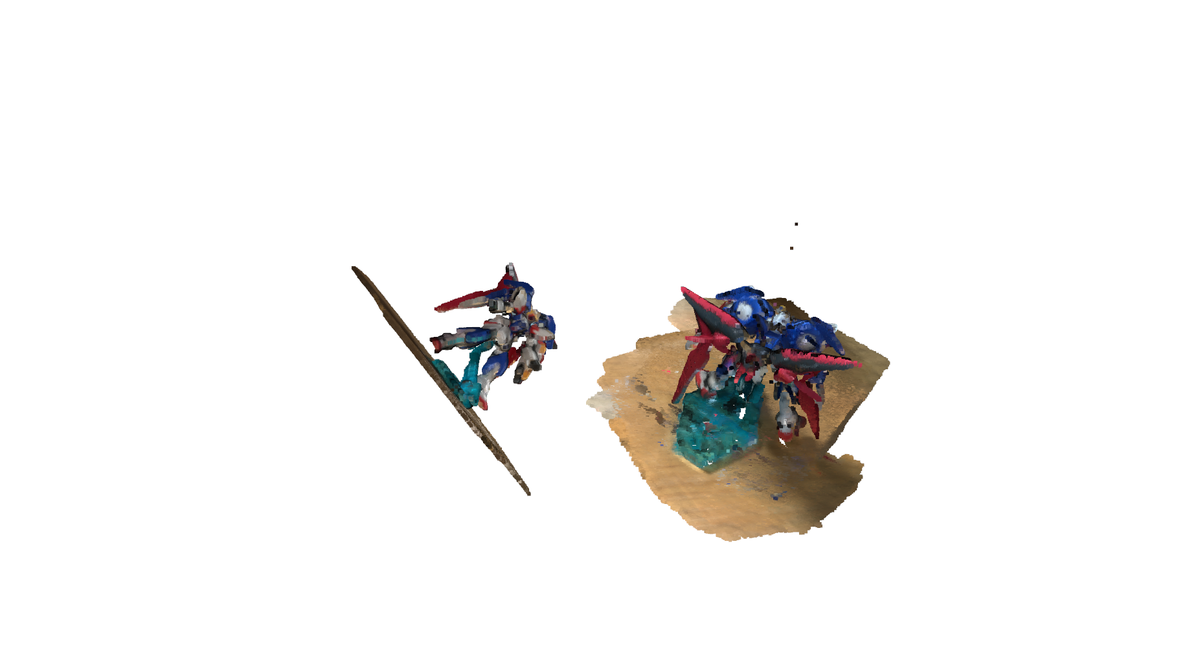
前面と後面
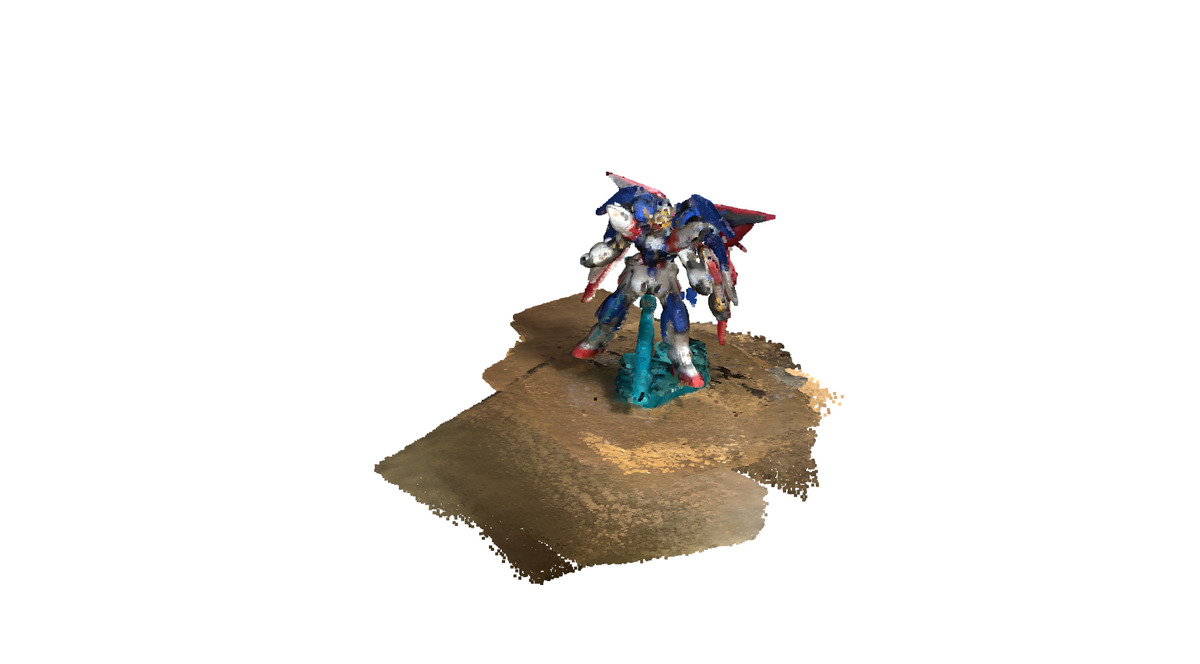
位置合わせ後
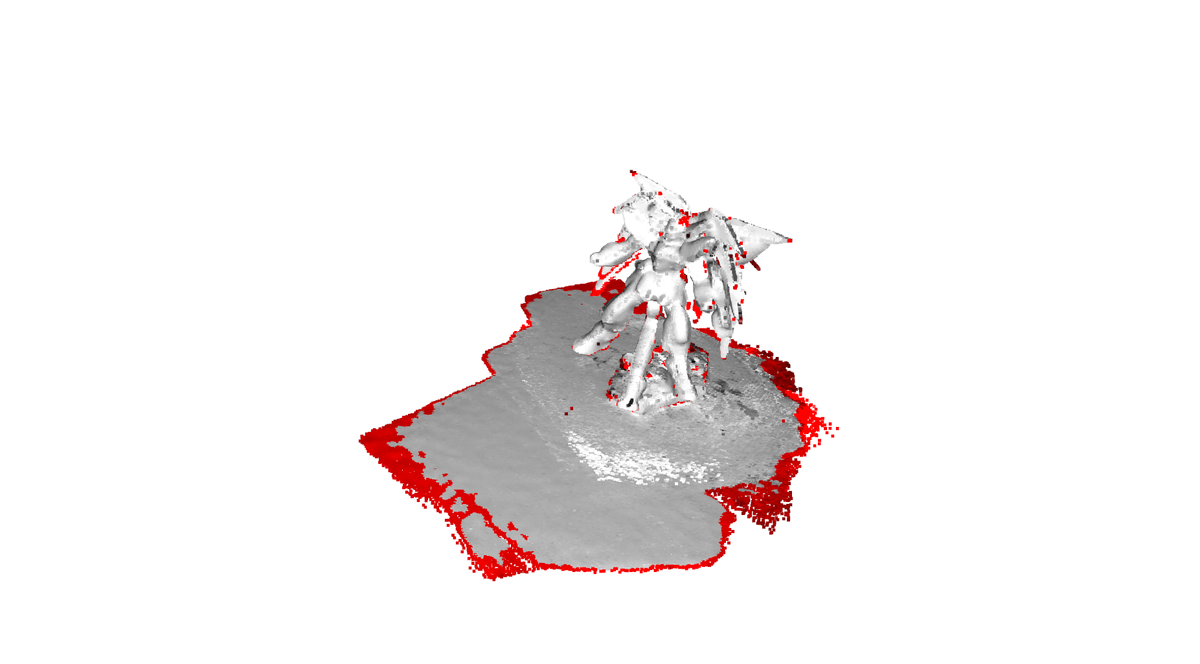
Outlier除去(赤が除外点)
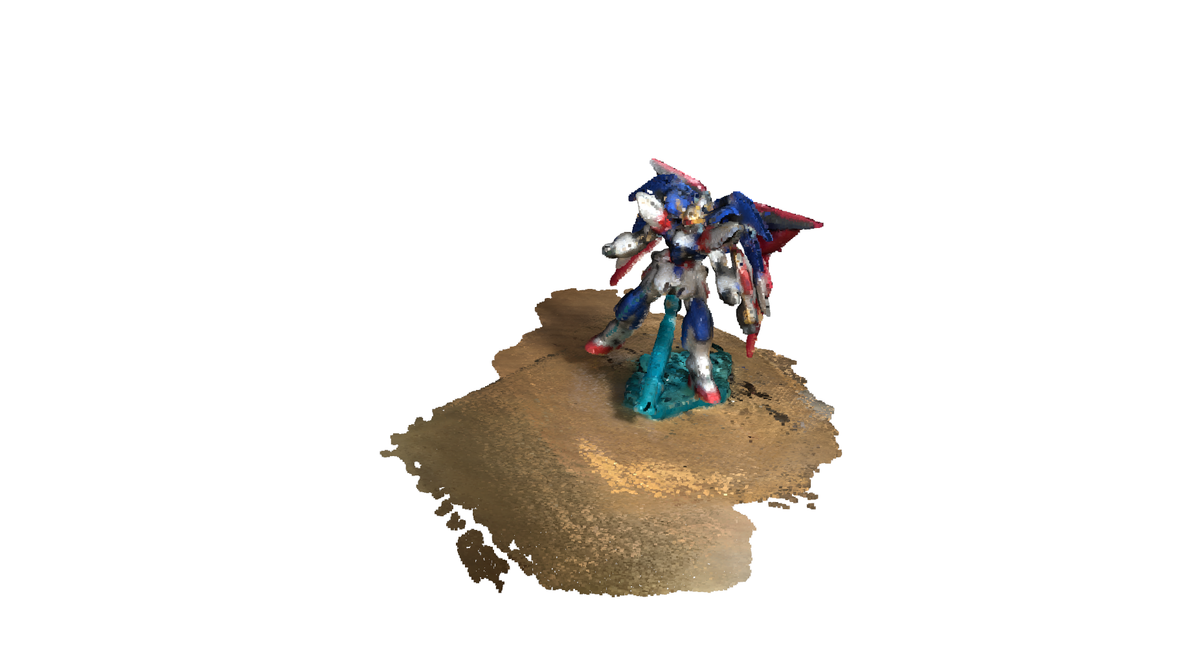
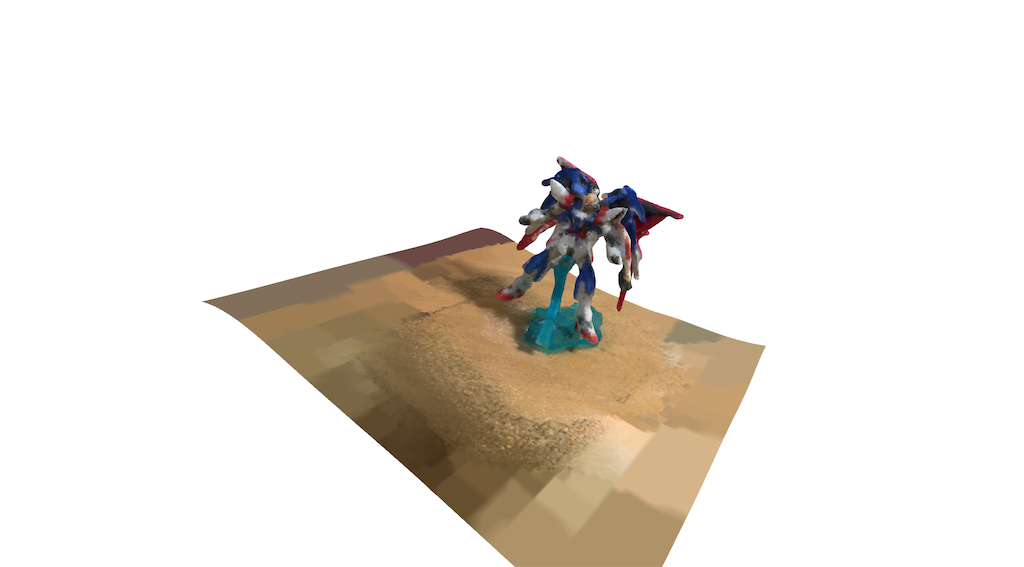
4-1. Outlier除去後(RGB)
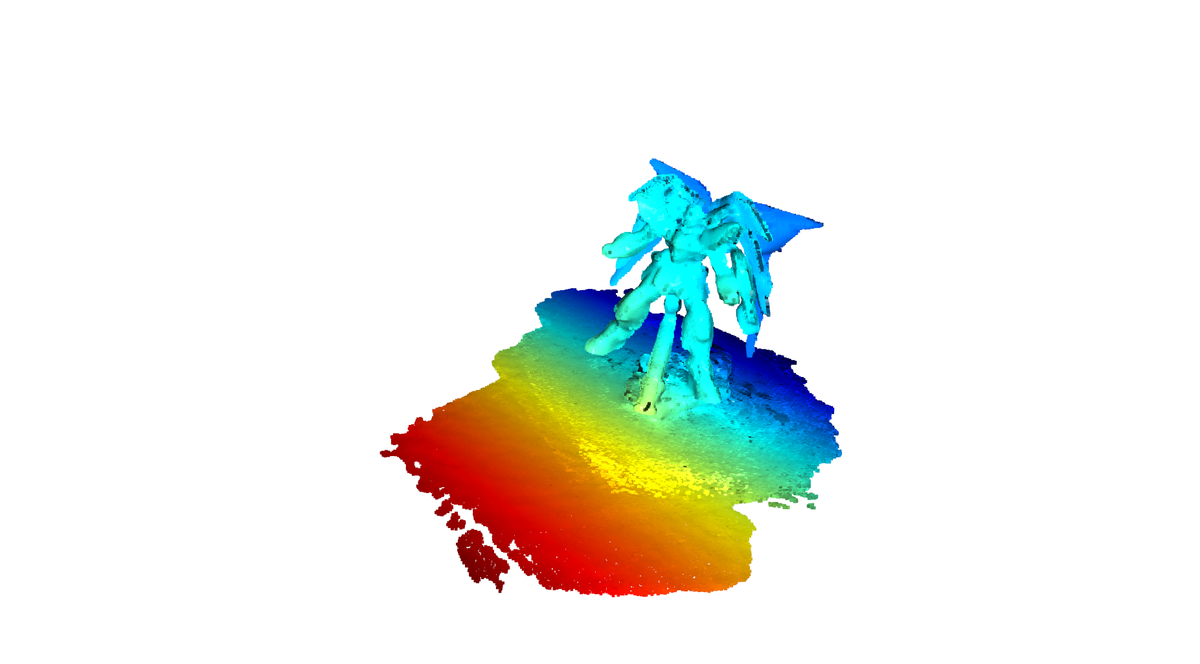
4-2. Outlier除去後(Y)
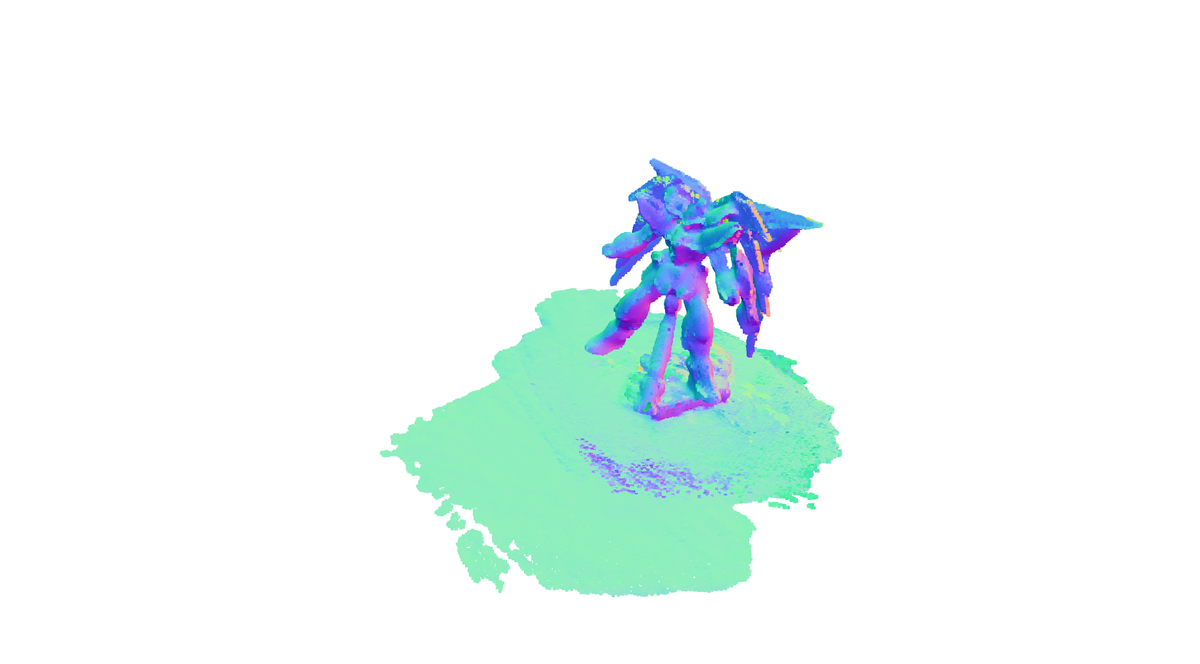
4-3. Outlier除去後(Normal)
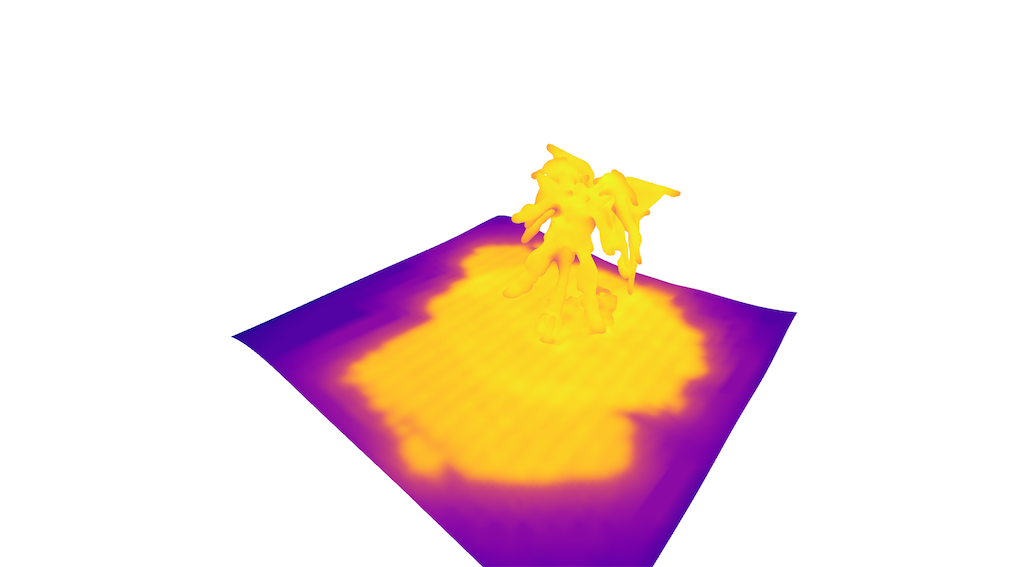
5-1. mesh化
5-2. mesh化した領域
まとめ
- きれいに仕上がると楽しいので,是非お試しください.